- Überblick
- 1. Hinführung
- 2. CAN-Kommunikation
- 3. CAN-Framing
- 4. CAN-Buszugriff
- 5. CAN-Datensicherung
-
6. CAN FD
- Motivation für CAN FD
- Vorteile und Konsequenzen
- Neue Botschaftsformate
- Details der CAN FD Botschaft
- CAN oder CAN FD, die Unterscheidung
- Kompatibilität von CAN und CAN FD Controllern
- Beschleunigte Übertragung
- Selbstanzeige bei zu häufigen Fehlern
- Länge des Datenfelds
- Mehr Daten bei gleichbleibender Sicherheit
- Geändertes Bitstuffing und CRC-Berechnung
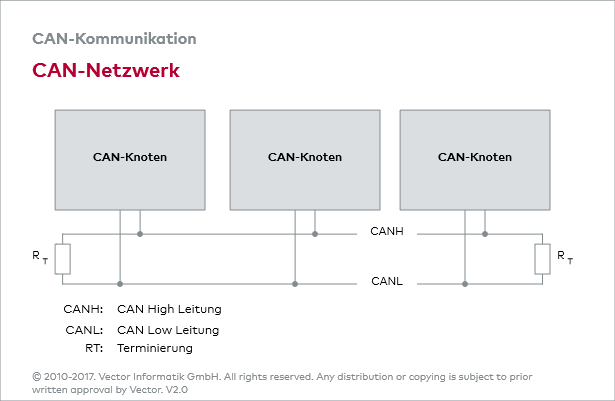
Aufbau
Ein CAN-Netzwerk setzt sich aus einer Anzahl von CAN-Knoten zusammen, die über ein physikalisches Übertragungsmedium (CAN-Bus) verbunden sind. In der Praxis wird dem CAN-Netzwerk üblicherweise eine Linientopologie zugrunde gelegt: an einen linearen Bus wird eine Anzahl von elektronischen Steuergeräten mit CAN-Schnittstelle passiv angeschlossen. Alternativ zur Linie findet auch die passive Sterntopologie Anwendung.
Physikalisches Übertragungsmedium
Das physikalische Übertragungsmedium wird in den häufigsten Einsatzfällen als verdrillte, ungeschirmte Zweidrahtleitung (Unshielded Twisted Pair - UTP) ausgeführt, über die eine symmetrische Signalübertragung erfolgt. Typischerweise kommen UTP zum Einsatz, deren Leitungsquerschnitt zwischen 0,34 mm2 und 0,6 mm2 liegt. Der Widerstandsbelag der Leitung sollte kleiner als 60 mΩ/m sein.
Randbedingungen
Die maximale Datenrate liegt bei 1 MBit/s. Zulässig dabei ist eine maximale Netzwerkausdehnung von circa 40 Meter. An den Enden des CAN-Netzwerks tragen Busabschlusswiderstände zur Vermeidung von Ausgleichsvorgängen (Reflexionen) bei. Die maximale Anzahl von CAN-Knoten wird von der ISO 11898 mit 32 angegeben.
Zuletzt geändert: Mittwoch, 22. September 2021, 10:30